RV减速器 精密传动的核心结构与工作原理
在工业机器人、精密机床等高端装备领域,RV减速器以其卓越的传动精度、高刚性和紧凑结构,成为核心传动部件的首选。它结合了行星齿轮传动和摆线针轮传动的双重优势,实现了大减速比、高扭矩和微小回差。下面,我们将通过3D动画的视角,深入解析RV减速器的精妙结构与工作原理。
一、核心结构组成
RV减速器主要由两级减速机构构成,结构精密而紧凑:
- 第一级:行星齿轮减速机构
- 太阳轮(输入轴):动力由此输入,通常与伺服电机直接相连。
- 行星轮:通常有3个,均匀分布在太阳轮周围,与太阳轮和外齿圈同时啮合,进行第一级减速。
- 行星架:承载行星轮,并将第一级减速后的运动传递至下一级。
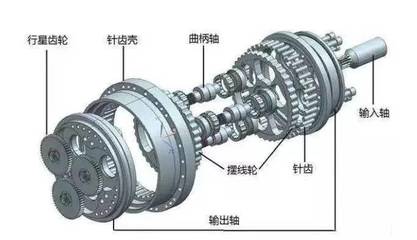
- 第二级:摆线针轮减速机构(RV传动)
- 曲柄轴:与第一级的行星架相连,其偏心轴部分驱动摆线轮。通常有2个相位差180度的曲柄轴,以平衡离心力,提高运转平稳性。
- 摆线轮(RV齿轮):核心部件,其轮廓是精确的摆线曲线。在曲柄轴的偏心驱动下,摆线轮进行偏心摆动。通常采用两个相位差180度的摆线轮,进一步增强平衡性与承载能力。
- 针齿壳:固定不动的外壳,内圈装有一系列圆柱形的针齿。摆线轮的外齿与这些针齿啮合。
- 输出盘:与摆线轮通过销孔或类似机构相连,将摆线轮的摆动转化为绕轴心的旋转运动并输出。
二、工作原理详解
动力传递过程清晰展现了其两级减速的智慧:
- 动力输入与第一级减速:伺服电机驱动太阳轮高速旋转,带动三个行星轮绕太阳轮公转的同时自转。由于行星架的约束,行星轮的公转速度远低于太阳轮转速,从而完成第一级减速(减速比通常为几比一到十几比一)。减速后的运动通过行星架传递给曲柄轴。
- 核心的第二级减速与运动转化:这是RV减速器的精髓所在。
- 偏心摆动:曲柄轴带动摆线轮做平面偏心运动(即绕自身轴线自转的其几何中心绕针齿壳中心公转)。
- 齿差减速:由于摆线轮齿数比针齿壳上的针齿数量少1个(或少量几个),当曲柄轴(即行星架)转动一周时,摆线轮与针齿的啮合会迫使摆线轮朝相反方向转过一个微小的角度(相当于1个齿的间隙)。
- 运动输出:摆线轮的这种复合运动(偏心摆动+微小反向自转)通过均匀分布在输出盘上的传动销传递至输出盘。传动销与摆线轮上的销孔配合,允许摆线轮的偏心摆动,但会约束其反向自转分量,从而将这个微小的反向旋转放大并转化为输出盘的低速、大扭矩旋转。
- 最终输出:经过两级减速的叠加,最终在输出盘上获得极高的总减速比(可达30:1至200:1甚至更高)、极高的扭转刚度和近乎零背隙的精密旋转运动。
三、核心优势与动画展示价值
通过3D动画,我们可以直观地看到:
- 高刚性:多齿同时啮合(摆线轮有近一半的齿同时与针齿接触),承载面积大。
- 高精度与零背隙:独特的齿形和相位差设计,消除了运动间隙。
- 紧凑高效:两级传动集成于一个紧凑壳体,功率密度高。
- 平稳低振:力流分布均匀,多个部件相位差设计抵消了不平衡力。
****
RV减速器是精密机械设计的典范。3D动画的拆解与演示,让我们得以透视其内部复杂的协同运动,理解它是如何将高速输入转化为稳定、精准、强劲的输出动力,从而成为高端智能制造装备中不可或缺的“关节”与“脊梁”。